





Actualités de l’entreprise

Pourquoi la simulation patellaire est essentielle en TKA – et comment elle améliore les résultats des patients
Quand on parle de succès en arthroplastie totale du genou (TKA), la discussion se concentre souvent sur l’alignement, la longévité de l’implant ou l’équilibre des tissus mous. Mais il existe un facteur qui détermine silencieusement si un patient quitte l’hôpital satisfait ou frustré : l’articulation patellofémorale. Une rotule négligée peut compromettre une prothèse de genou par ailleurs parfaite. C’est pourquoi la simulation patellaire — la capacité à modéliser virtuellement et à prédire le trajet patellaire ainsi que les forces de contact avant la moindre coupe osseuse — est passée du statut d’option appréciable à celui de nécessité clinique. Le problème clinique que nous ne pouvons ignorer La douleur antérieure du genou demeure l’une des complications les plus fréquentes après une TKA, touchant jusqu’à 20 à 30 % des patients dans certaines études. Elle entraîne une insatisfaction, des reprises chirurgicales et une augmentation des coûts de santé. La cause profonde ? Souvent, c’est une inadéquation entre la géométrie de l’implant et la biomécanique patellofémorale native du patient. Les outils traditionnels de planification chirurgicale traitent la rotule comme un élément secondaire. Pourtant, chaque patient présente une hauteur patellaire, une morphologie de la gorge trochléenne et un angle Q qui lui sont propres. Sans simulation patellaire spécifique au patient, nous ne faisons essentiellement que deviner comment la rotule se déplacera après l’opération. Comment la simulation patellaire change la donne La simulation patellaire permet à l’équipe chirurgicale de : Visualiser en temps réel le trajet patellaire sur toute l’amplitude du mouvement — de l’extension à la flexion profonde. Identifier d’éventuels cas de « surremplissage » ou de « sous-résection » du compartiment patellofémoral avant de réaliser des résections osseuses irréversibles. Optimiser la rotation de l’implant et le dimensionnement du composant fémoral afin de restaurer la gorge trochléenne native. Réduire le taux de libération rétinaculaire latérale en équilibrant proactivement les forces patellofémorales. Le résultat ? Une récupération postopératoire plus fluide, moins de douleur antérieure du genou et un genou qui semble plus naturel pour le patient. La proposition de valeur pour les chirurgiens et les hôpitaux Pour les chirurgiens, la simulation patellaire réduit les approximations peropératoires et le risque de reprise. Pour les hôpitaux et les systèmes de santé, elle contribue à de meilleurs scores de satisfaction des patients, à des durées de séjour plus courtes et à des taux de réadmission à 90 jours plus faibles — des indicateurs clés dans les modèles de soins fondés sur la valeur. Et pour les patients ? Ils peuvent reprendre la randonnée, s’agenouiller et jouer avec leurs petits-enfants sans cette douleur antérieure persistante. Perspectives : la simulation comme nouveau standard de soins Nous entrons dans une ère où la biomécanique prédictive définira l’excellence chirurgicale. Tout comme le gabarit préopératoire en chirurgie de la hanche est devenu universel, la simulation patellofémorale est en passe de devenir une étape incontournable de la chirurgie moderne du genou. Dans votre pratique, quel est le plus grand obstacle à la gestion du suivi patellaire ? L’expérience ou la technologie ? Si vous avez constaté l’impact de la simulation dans votre pratique, ou si vous souhaitez approfondir cette technologie, lançons la conversation.
Au-delà du circuit fermé : le virage stratégique vers la plateforme ouverte et la précision submillimétrique en orthopédie
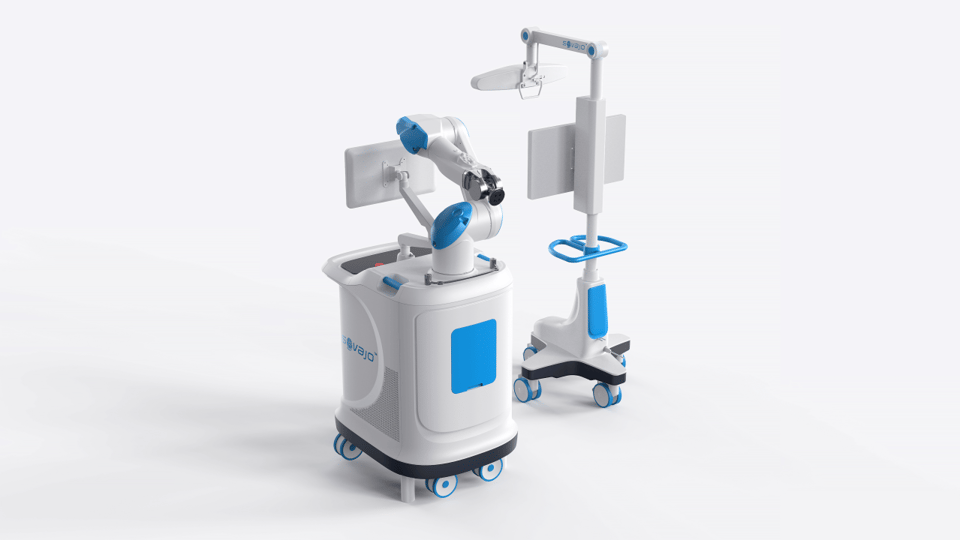
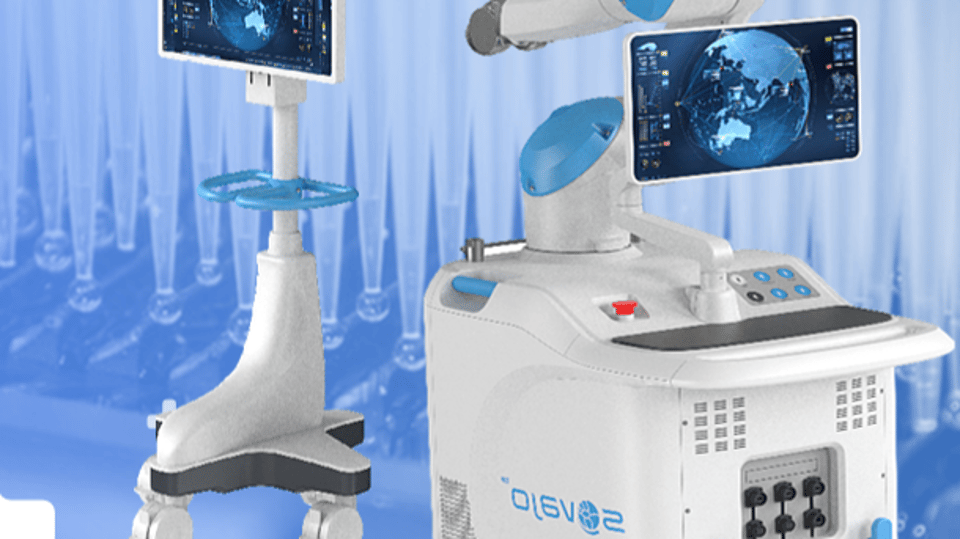
L’essor rapide de l’arthroplastie totale du genou (PTG) assistée par robot a présenté aux services chirurgicaux un ensemble complexe de choix technologiques. Au-delà de l’attrait marketing initial, l’utilité clinique d’une plateforme robotique se définit par son architecture mécanique, son mode d’exécution et son intégration dans l’écosystème prothétique existant. Cette revue présente les critères techniques essentiels que les chirurgiens et les administrateurs hospitaliers doivent évaluer pour garantir un succès clinique et opérationnel à long terme. 1. Le paysage mondial : archétypes architecturaux Le marché actuel se divise entre des plateformes mondiales établies et de nouveaux innovateurs de haute précision. Ces systèmes peuvent être classés selon leur philosophie mécanique : Systèmes de navigation traditionnels : Plateformes établies axées sur l’alignement et le positionnement, souvent avec une empreinte réduite ou des conceptions montées sur table. Plateformes semi-actives intégrées : Systèmes qui utilisent un bras robotique dédié pour assister ou réaliser la résection osseuse. Dans cette catégorie, une nouvelle génération de systèmes à haute rigidité , comme Sovajobouscule les standards précoces du secteur en faisant de la stabilité mécanique le fondement de la précision. 2. Critères d’évaluation essentiels pour l’achat en chirurgie I. Précision du recalage : la frontière du sous-millimètre Si la première génération d’assistants robotiques a établi une précision standard du secteur d’environ 0,3 mm à 0,5 mm , les avancées techniques ont encore repoussé cette frontière. Pertinence clinique : Les chirurgiens doivent distinguer entre la « précision de planification statique » et la « précision active du recalage ». Les plateformes récentes à haute rigidité affichent une précision de recalage documentée de 0,15 mm. Cette réduction de la marge d’erreur est essentielle dans les cas complexes où la morphologie osseuse est déformée, garantissant que l’exécution physique corresponde au plan numérique avec la plus grande fidélité possible. II. Mode d’exécution : systèmes semi-actifs vs navigation passive Une distinction fondamentale réside dans la manière dont le robot interagit avec l’instrument chirurgical : Navigation passive (le « gabarit robotique ») : Le robot positionne un guide de coupe, mais le chirurgien utilise manuellement la scie. Si cela garantit l’alignement, cela n’offre aucune protection contre les écarts manuels ou les lésions des tissus mous pendant la coupe. Exécution semi-active (outillage intégré) : Les plateformes avancées utilisent un bras robotique qui contrôle directement l’instrument (par exemple, une scie oscillante). III. Philosophie mécanique : architectures à haute rigidité vs bras flexibles La structure physique du bras robotique a un impact significatif sur ses performances sous la contrainte de la résection osseuse : Bras flexibles/légers : Souvent conçus pour être portables, ces bras peuvent nécessiter des fixateurs de jambe invasifs afin de compenser les mouvements potentiels et le manque de résistance intrinsèque pendant la coupe. Bras à haute rigidité : En utilisant un bras robuste à haute rigidité, des systèmes comme Sovajo éliminent les micro-vibrations pendant la coupe active. IV. Architecture de l’écosystème : plateforme ouverte vs circuit fermé Le choix entre des systèmes propriétaires et agnostiques est un moteur majeur du ROI à long terme : Systèmes fermés : Ils sont liés aux implants propriétaires d’un fabricant donné. Bien qu’intégrés, ils limitent le choix clinique du chirurgien et peuvent accroître la vulnérabilité de la chaîne d’approvisionnement de l’hôpital. Plateformes ouvertes (compatibles avec tous les implants) : Les leaders émergents adoptent une philosophie de plateforme ouverte. Synergie : Un système compatible avec plusieurs grandes marques d’implants (différentes gammes internationales) permet à l’hôpital d’exploiter son stock existant. Cela protège les marges des distributeurs et permet une sélection d’implants adaptée au patient, sans contrainte robotique. Conclusion : définir la norme de demain Pour un service de chirurgie, l’investissement robotique idéal est celui qui adopte une approche « sans compromis » en matière d’exécution. Une plateforme qui combine une précision submillimétrique (0,15 mm), la sécurité active d’un système semi-actif, et la stabilité mécanique d’un bras à haute rigidité représente le summum actuel de l’ingénierie orthopédique. Lorsque ces caractéristiques s’inscrivent dans une architecture de plateforme ouverte, le résultat est un système qui améliore les résultats cliniques tout en conservant une flexibilité opérationnelle maximale.
Révolutionner l’arthroplastie : pourquoi la « rigidité » devient la nouvelle référence en robotique orthopédique
Depuis des années, les chirurgiens orthopédistes ont adopté l’assistance robotisée pour améliorer les résultats en TKA/THA. Cependant, de nombreux systèmes de première génération ont apporté leur lot de frustrations cliniques — en particulier ceux utilisant des bras robotisés « flexibles/légers ». Les principaux points de douleur des chirurgiens : ❌ Instabilité de précision : les bras flexibles souffrent souvent de micro-vibrations pendant la coupe osseuse active, entraînant des erreurs d’ostéotomie pouvant dépasser 2 à 3 mm. ❌ Complexité de la procédure : pour compenser la flexibilité du bras, ces systèmes nécessitent des fixateurs/immobilisateurs de jambe invasifs afin de s’assurer que le patient ne bouge pas d’un millimètre. Cela allonge le temps opératoire, augmente le traumatisme des tissus mous et complique le flux de travail. ❌ Problèmes de prévisibilité : une rigidité incohérente signifie des résultats incohérents. La solution Sovajo : l’ingénierie de la stabilité avec des bras à haute rigidité 🎯 Chez Sovajo, nous pensons que le robot doit s’adapter au chirurgien, et non l’inverse. Notre système de nouvelle génération utilise un bras robotisé médical à haute rigidité combiné à des algorithmes propriétaires de contrôle du mouvement pour résoudre ces problèmes hérités : ✅ Précision au sous-millimètre : notre bras rigide limite les fluctuations à moins de 0,3 mm, garantissant une coupe exactement à l’endroit prévu. ✅ Flux de travail sans fixation : fini les fixateurs de jambe encombrants. La stabilité de notre système permet une procédure plus naturelle et rationalisée, qui fait gagner un temps précieux au bloc opératoire. ✅ Efficacité intégrée : avec la scie oscillante intégrée directement dans le bras rigide, vous bénéficiez d’une expérience fluide d’« intégration du positionnement et de l’ostéotomie ». La précision ne devrait pas se payer au prix de la complexité. Il est temps de dépasser les limites des systèmes flexibles et d’adopter la puissance de la stabilité rigide. 🚀 Découvrez la différence Sovajo. Entrez dans l’avenir de la chirurgie orthopédique. #Orthopédie #RobotiqueChirurgicale #MedTech #PTG #ProthèseArticulaire #SantéNumérique #Sovajo #SantéDigitale #ChirurgienOrthopédiste #Innovation #MedTechAsieDuSudEst
